Geodézia építészeknek jegyzet
Geodézia építészeknek jegyzet - Belépés
6. Korszerű geodéziai műszerek és módszerek
6.2. GPS
A globális helymeghatározó rendszert a 21. században sokan ismerik és használják. Legismertebb hétköznapi alkalmazási területe talán az autónavigáció és a geoláda vadászat (geocaching). Működésének alapelve a műholdas helymeghatározás vektorháromszöge alapján érthető meg:
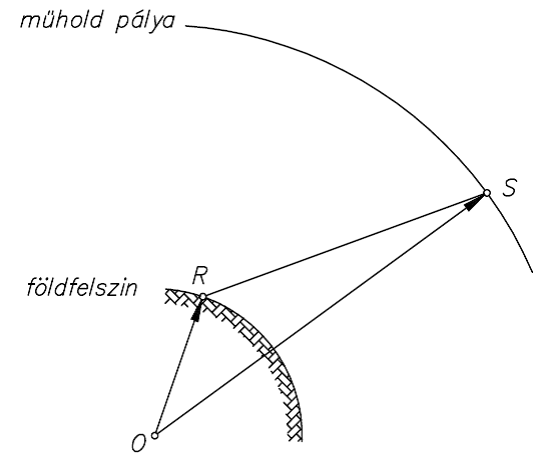
Ebben ismert a Föld tömegközéppontjából a műholdra mutató vektor, vagyis az ábrán az O és S pontokat összekötő vektor, hiszen a műholdak ismert pályán keringenek a Föld körül. Mérjük a műhold és a vevő (R) közötti vektor hosszát, vagyis a műhold-vevő távolságot. Keressük a Föld tömegközéppontjáról a vevőre mutató (O és R pontok közötti) vektor három komponensét, vagyis a vevőnk térbeli koordinátáit.
Ha egyetlen műholdra történne a mérés, akkor nem tudnánk megmondani, hogy a vevő a műhold köré rajzolt és a megmért távolsággal egyező sugarú gömb felszínén hol található. Ha legalább három műholdra történik a mérés, akkor három ilyen gömb metszéspontjában van a vevőnk, vagyis ismertté válik a Föld tömegközéppontjáról a vevőre mutató vektor is.
Valójában szükség van egy negyedik adatra is. Tekintve, hogy a műhold-vevő távolság mérése időmérésen alapul, ehhez a vevő óráját a GPS-rendszer idejéhez szinkronizálni szükséges. A negyedik ismeretlen tehát a vevő órájának és a rendszeridőnek az eltérése lesz. Átlagos körülmények között több, mint négy műhold mérése lehetséges, a további, ún. fölös mérések lehetőséget adnak az eredmények pontosítására.
A GPS-műholdakra támaszkodva a GPS saját koordináta-rendszerében kapjuk a helymeghatározás eredményét (WGS84, World Geodetic System 1984). Ebből a rendszerből megfelelő koordináta-transzformáció segítségével lehet a mérnöki gyakorlatban szokásos koordináta-rendszerekbe áttérni, azaz vízszintes értelemben az Egységes Országos Vetületi koordinátákra, magassági értelemben pl. a Balti alapszinten értelmezett magasságokra.A méréseket számos hiba terheli. A legfontosabbak:
- a műholdak pályahibája: korábban azt mondtuk, hogy a műholdak ismert pályán keringenek. Valójában a műholdak pályáját első közelítésben csak néhány méteres pontossággal ismerjük.
- a műholdak órahibája: a műhold-vevő távolság meghatározásának egyik módja időmérésen alapul, vagyis megmérjük, hogy egy impulzus mennyi idő alatt jut el a műholdról a vevőbe. Ehhez a műhold óráján mérjük a jel indulásának időpontját, a vevő óráján a jel beérkezését. A műholdak fedélzetén nagy pontosságú, de nem hibátlan atomórák találhatók. Hasonló hibát okoz a vevők órahibája is.
- a légkör jelkésleltető hatása. Folytatva az előbbi
gondolatmenetet: megmérjük a jel futási idejét, ezt megszorozva az
elektromágneses jelek terjedési sebességével (közelítő értéke 300 000
km/s) kapjuk a műhold vevő távolságot. A terjedési sebesség pontos értékét
ugyanakkor vákuumban ismerjük, a Föld légkörében a jelek valamelyest lassulnak.
A hibák következtében alapesetben néhány méterre pontos helymeghatározás végezhető, ami a hétköznapi (nem geodéziai célú) felhasználások esetében legtöbbször megfelelő.
A GPS geodéziai alkalmazási lehetőségeit már a kezdet kezdetén felismerték. Ahhoz, hogy a néhány méteres pontosságot a geodéziában kívánatos néhány cm körüli értékre fokozzák, több feltételnek is egyidejűleg teljesülnie kell:
- Relatív helymeghatározást kell végezni. Ha a mérést két, egymástól nem túl nagy távolságban található vevővel végzik, akkor a méréseket lényegében azonos hibák terhelik. Ha tehát kivonjuk egymásból a két vevő ugyanazon műholdra vonatkozó méréseit, akkor a különbség mentes lesz a hibák túlnyomó részétől. Eredményül a két vevő közötti különbségvektort kapjuk, emiatt az egyik vevőnek ismert koordinátájú, vagyis alapponton kell mérnie. A geodéziában szinte mindig relatív helymeghatározást végzünk.
- Időmérés helyett fázismérés. A fent vázolt időmérés méréstechnikailag viszonylag egyszerűen, a másodperc tört része alatt elvégezhető. Ugyanakkor a mérést jelentős mérési zaj terheli. Emiatt a geodéziában fázismérést végzünk, vagyis mérjük a műhold és a vevő közötti egész ciklusok számát és a maradék távolsággal egyenesen arányos fázisszöget. A fázismérést terhelő zaj általában elhanyagolható. Ugyanakkor a módszer legnagyobb nehézsége, hogy az egész ciklusok kezdeti számértékét nem ismerjük, azt statisztikai próbálgatás útján határozhatjuk meg. A statisztikai módszer jellemzően jónéhány percig folyamatosan tiszta, erős jel mérését igényli. A fázisméréshez speciális vevőre és antennára van szükség.
- Kezdetben a relatív helymeghatározáshoz szükséges, a két vevő közötti adatcserét ú.n. utófeldolgozás útján valósították meg. Vagyis a mérést követően az irodában történt az adatok számítógépre vitele és feldolgozása. Az utófeldolgozás hátránya, hogy a mérés eredményét utólag, és nem a mérés helyszínén határozzák meg. Manapság egyre inkább kiszorítja az utófeldolgozást a valós idejű helymeghatározás, vagyis a műszerek között folyamatos a kommunikáció, az adatcsere. A számításokat maguk a vevők valós időben, a mérés helyszínén végzik. A kommunikáció rádiók segítségével vagy terepi internet kapcsolat segítségével valósítható meg. A valós idejű helymeghatározás geodéziában alkalmazott módszerének elnevezése: RTK, Real-Time Kinematic. Megjegyezzük, hogy a valós idejű helymeghatározáshoz szükséges hardver elemek ára jelentősen magasabb, mint az utófeldolgozáshoz szükséges eszközöké.
- A relatív helymeghatározás kapcsán említettük, hogy az egyik vevőnk, más szóval a referencia vevőnk ismert koordinátájú alapponton áll. Hamar felismerték, hogy nem gazdaságos minden egyes méréshez ú.n. saját referencia vevőt üzemeltetni. Ennél gazdaságosabb az ú.n. GPS-infrastruktúrára támaszkodni. Magyarország esetében az állami földmérés és néhány magánvállalkozás is üzemeltet GPS-infrastruktúrát. Az állami földmérés rendszere több, mint 50 permanens állomást üzemeltet, ezek egy része határainkon kívül található, de nemzetközi szerződés keretében kapjuk adataikat. Az állomások folyamatosan mérnek, adataik utófeldolgozás esetén utólag letölthetők az internetről, valós idejű felhasználáshoz a szükséges adatok on-line elérhetők. Mindez persze csekély térítés ellenében, regisztrált felhasználók részére.
- Korábban említettük a koordináta-transzformáció szükségességét. A transzformáció végrehajtásának részleteire nem térünk ki, csak annyit jegyzünk meg, hogy a gyakorlati megoldása számos problémát vet fel. Végeredményben a koordináta-transzformáció jellemzően néhány centiméteres pontossággal oldhatók meg, ami némi pontosságvesztést jelent.
A fejezet végén megjegyezzük, hogy a GPS nagyon sok feladathoz kényelmes, gyors, gazdaságos megoldást jelent. Ugyanakkor alkalmazásának több korlátozó tényező is gátat vet:
- Működéséhez szabad kilátás kell az égbolt jelentős részére. Különösen sűrűn beépített városi környezetben ez nehezen biztosítható.
- Pontossága nem minden feladathoz megfelelő. A geodéziában jellemzően néhány cm-es pontosság érhető el GPS-technikával, de ez – különösen a magasság tekintetében – számos feladat esetében elmarad a követelményektől.